Capabilities of full-body wearable Teslasuit as a self-standing FES device
Exploratory study by R&D Department, Teslasuit
Functional electrical stimulation (FES) devices are widely applied in rehabilitation and medical practice. The underlying technique uses low-energy electrical pulses to artificially generate body movements in individuals after various medical conditions including stroke, spinal cord injury, multiple sclerosis, cerebral palsy, etc.
Generally, FES systems could be classified into three groups: open-loop, finite state control and closed-loop approach. These three approaches describe the staging or evolution of FES systems from simple to more sophisticated ones. All mentioned approaches could be implemented and provided to the end-user with the help of Teslasuit. This unification, as we think, could cover, and simplify most stages of the FES decisions life cycle, starting from developing those in a lab as well as student and personal education, ending with the clinical use.

Materials and Methods
For this study, researchers used a full-body Teslasuit, Teslasuit software development kit (SDK with Haptic Editor tool and Suit client API) and external operating code when needed.
The full-body Teslasuit is equipped with a standard electrostimulation system consisting of 80 channels (16 for every extremity and 16 for the back and belly, see Figure 1) and a markerless motion capture system with 14 inertial measurement unit (IMU) sensors (MoCap system, see Figure 2). Haptic editor tool allows to create, tune, and run stimulation patterns with various signal parameters for each of the 80 EMS channels with a fixed voltage of 60 volts: stimulation frequency could be tuned in the range of 1 to 150 Hz, and stimulation pulse width in 1–320 μs range.

Figure 1. Placement of EMS electrodes in a full-body wearable Teslasuit

Figure 2. Placement of IMU sensors in a full-body wearable Teslasuit
To test whether Teslasuit technology can be used for FES, researchers applied the general description of different FES approaches and reproduced functionality using the built-in functionality of the technology or extended it with additional external functions through Suit client API in the form of minimum viable products (MVPs).
Teslasuit as an open-loop FES device
An open-loop system is already developed and implemented at the Teslasuit upper software level as the Haptic Editor tool (see Figure 3). Haptic Editor allows to create complex stimulation patterns varying different electrical parameters in time within any EMS channel or combining stimulation patterns between all 80 EMS channels. All these patterns can be saved as files for later use with the same or other test subjects.
A simple case scenario includes:
- Connecting the suit to a computer and Haptic Editor.
- EMS system calibration.
- Creating and tuning EMS stimulation patterns in Haptic editor.
- Running stimulation patterns looped in time or by clicking the Start button. A virtual Start button in Haptic Editor could be replaced with a real-world mechanical button or another trigger (as a third-party device through the API).
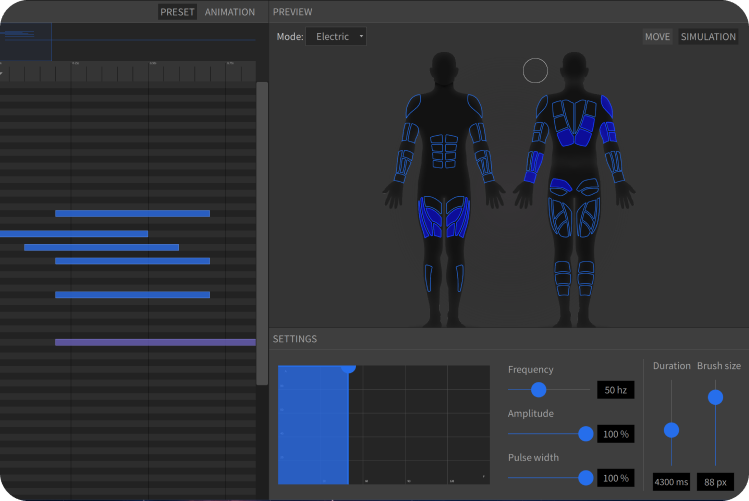
Figure 3. The controlling interface of Haptic Editor is used to configure EMS patterns for various FES applications.
Being a tool for the visual creation of complex stimulation patterns, Haptic Editor gives almost limitless possibilities to adjust Teslasuit technology to any needs as an open-loop FES device. Therefore, Teslasuit technology is capable to be used as an open-loop FES device as an out-of-the-box solution without additional extension but for research purposes only.
Teslasuit as a finite-state FES device
To prove the concept of Teslasuit technology being used for finite-state FES, researchers used a motion capture interface with its applied data processing solution called Step detector. Step detector is an SLTM neural network model, trained on the pre-gathered IMU data (accelerometer and gyroscope) obtained from both legs and back of 6 healthy subjects during walking. The model was trained using a standard ML pipeline with the data divided into training (80%), test (10%) and validation (10%) data sets. The accuracy achieved for the validation data set exceeded 90%.
The step detector provides information about foot-floor contact for each foot separately. These time-series data are enough to properly detect four walking phases (corresponding to a simplified gait cycle, see Figure 4): initial stance, terminal stance, initial swing, terminal swing. Simplified electrical stimulation patterns were assigned accordingly.
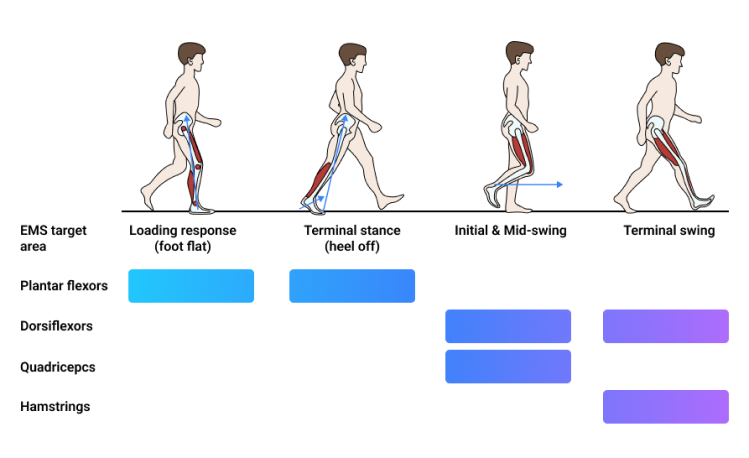
Figure 4. Schematic description of simplified walking FES implementation and corresponding EMS patterns
A simple case scenario includes:
- Connecting the suit to a computer.
- EMS system calibration.
- Motion capture system calibration.
The stance phase is marked by plantar flexor contraction, followed by dorsiflexors contraction occurring throughout the swing phase. After the initial swing, there is a quadriceps stimulation to extend the leg. Hamstrings stimulation (optional) starts at the terminal swing to stabilize a leg and prevent making a step on a fully extended extremity.
Due to some implementation aspects and muscle physiology, there is a delay of 150–200 ms between actual detection of the swing phase and actual knee extension caused by quadriceps stimulation. That is why quadriceps stimulation algorithmically starts right after initial swing detection, to be able to assist knee extension in the mid-swing.
Most of the discussion points from an open-loop approach are “inherited” in this MVP. Since finite-state systems heavily rely on input data additional validation of the MoCap system providing a set of step detection triggers is required. More sophisticated MoCap data such as ankle angles, angular velocity, angular acceleration could be tested as alternative triggers. For the end-user convenience, all MVP functionality (i.e., calibrations, EMS patterns editor, and running interface) should ideally be combined in our stand-alone program.
Interim results: Teslasuit technology is capable to be used as a finite-state FES device.
Teslasuit as a closed-loop FES device
To prove the concept, an MVP based on a simplified closed-loop control concept for the straightforward task of elbow flexion control is constructed. Teslasuit motion capture system provides real-time data of the current elbow angle, which is then compared to the target value set by the operator. The difference between the current and the target angle as a resulting error is processed by the PID controller, which adjusts the required level of biceps stimulation.
As for now, a muscle response function with further use of the classic Ziegler-Nichols method for selecting coefficients of the PID controller to solve the question of the PID controller calibration algorithm for each specific user is applied.
A simple case scenario includes:
- Connecting the suit to a computer.
- EMS system calibration.
- PID controller calibration.
Interim results: there is a potential to improve this MVP based on recommendations from healthcare professionals focusing on FES.
For more information contact Andrei Pyko at a.pyko@teslasuit.io