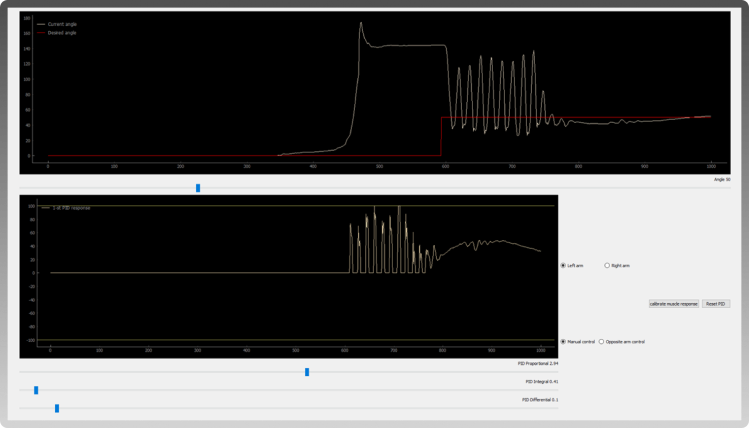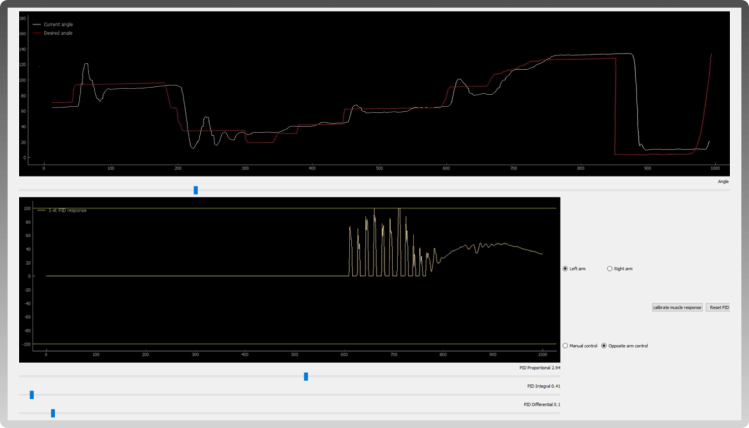
We ourselves set the desired angle of raising / lowering the hand by dragging the controller, which is under our first graph
There are three values in user control:
- PID Propotional
- PID Integral
- PID Differential
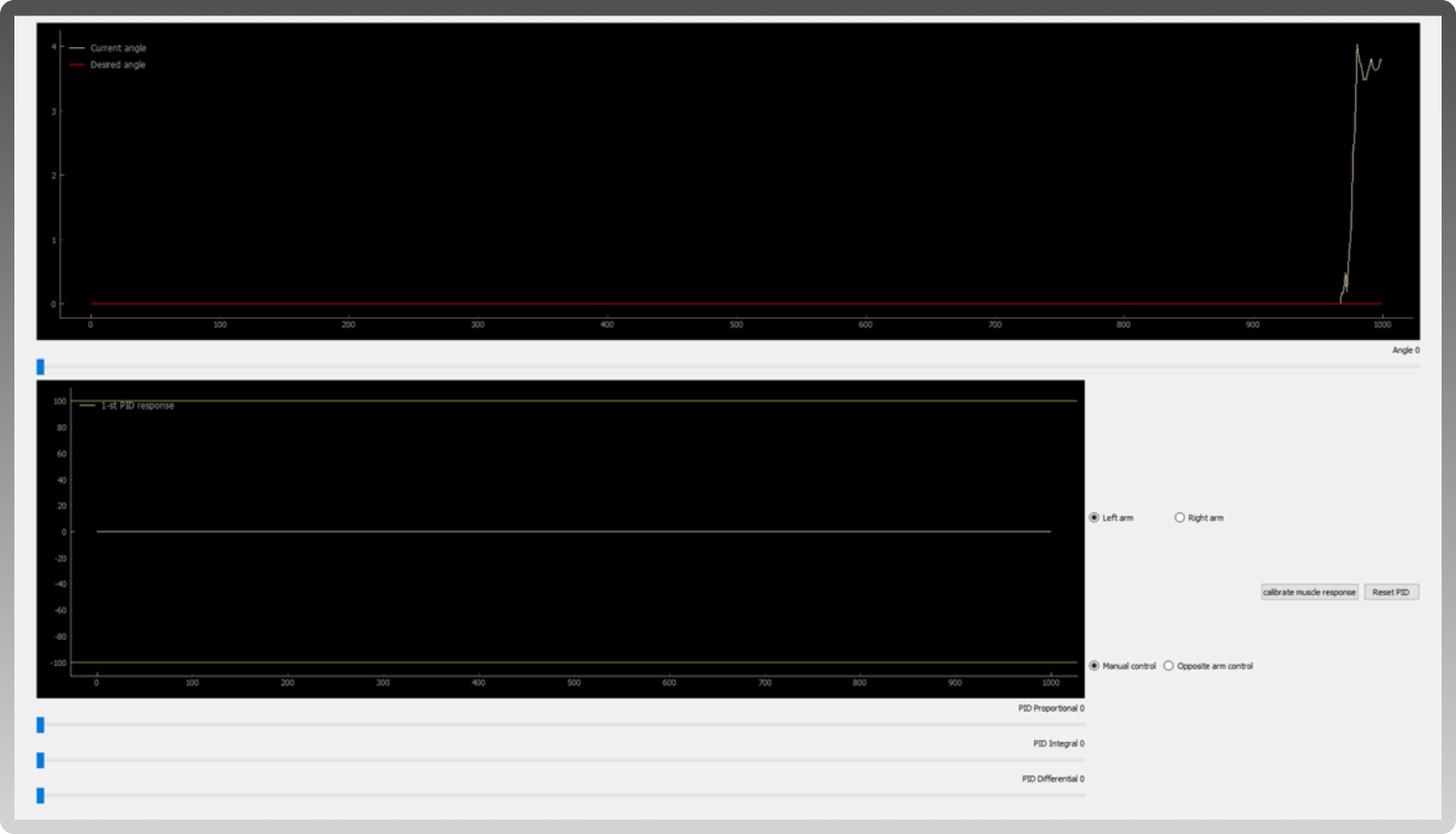
*Calibration is required for correct use of this mode